AI-first Approach
to Autonomous Driving
AI-first approach to autonomous driving
Minus Zero is pioneering end-to-end driving models that replaces traditional modular AV architecture with a single foundational model trained on large scale fleet data to give safe driving outputs from camera sensors.
Our self-supervised approach allows us to scale learning driving behaviour from raw data exhibiting superior generalisation capabilities and reasoning.
We are committed to enabling next-gen ADAS for emerging markets like India catering to unique driving cases and pricing competitiveness required but not available in solutions from developed markets.
Minus Zero is pioneering end-to-end driving models that replaces traditional modular AV architecture with a single foundational model trained on large scale fleet data to give safe driving outputs from camera sensors.
Our self-supervised approach allows us to scale learning driving behaviour from raw data exhibiting superior generalisation capabilities and reasoning.
We are committed to enabling next-gen ADAS for emerging markets like India catering to unique driving cases and pricing competitiveness required but not available in solutions from developed markets.
Minus Zero is pioneering end-to-end driving models that replaces traditional modular AV architecture with a single foundational model trained on large scale fleet data to give safe driving outputs from camera sensors.
Our self-supervised approach allows us to scale learning driving behaviour from raw data exhibiting superior generalisation capabilities and reasoning.
We are committed to enabling next-gen ADAS for emerging markets like India catering to unique driving cases and pricing competitiveness required but not available in solutions from developed markets.
Full Stack AI Platform for ADAS
Indigenously built to accelerate the path from development to production.
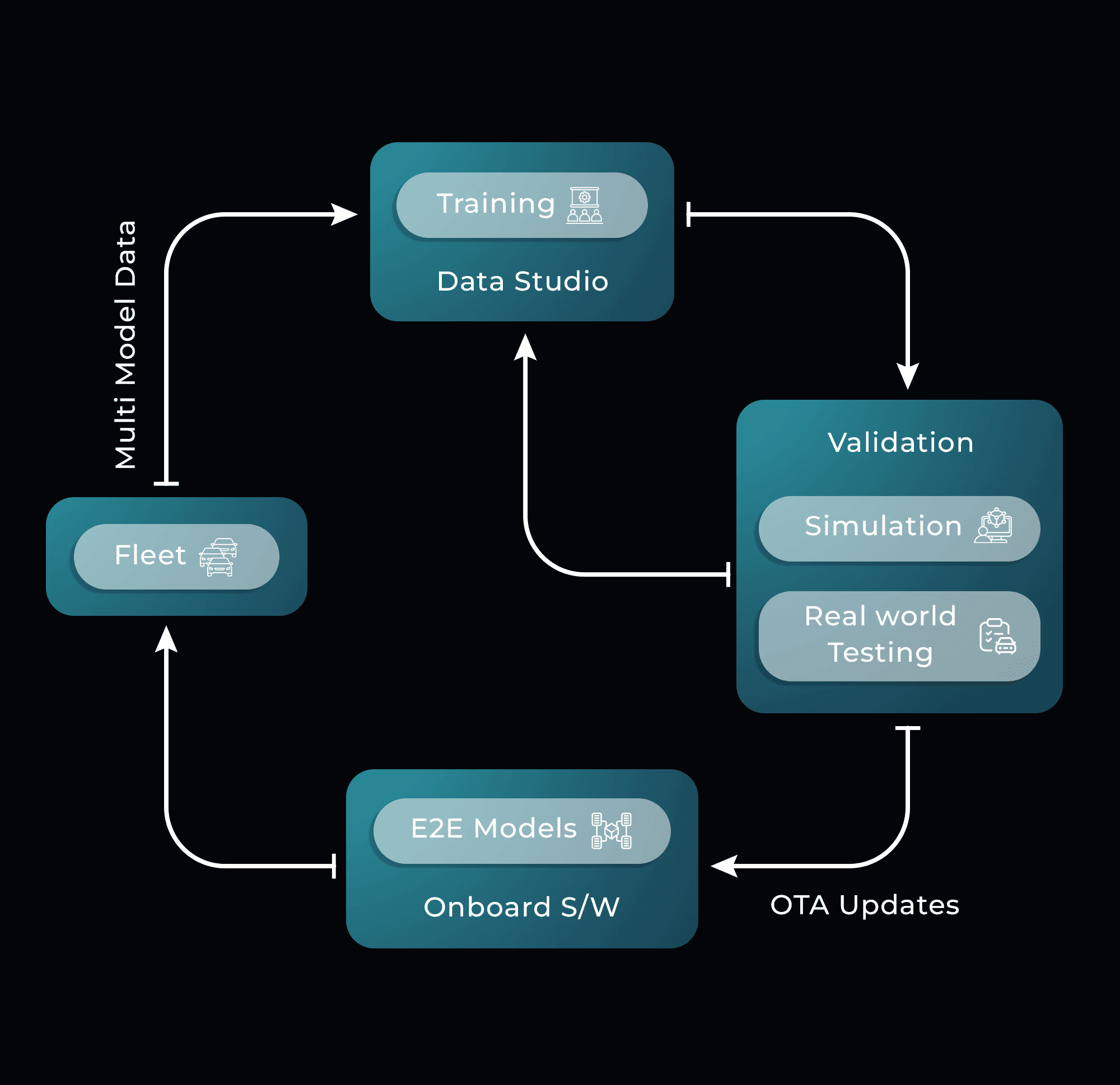
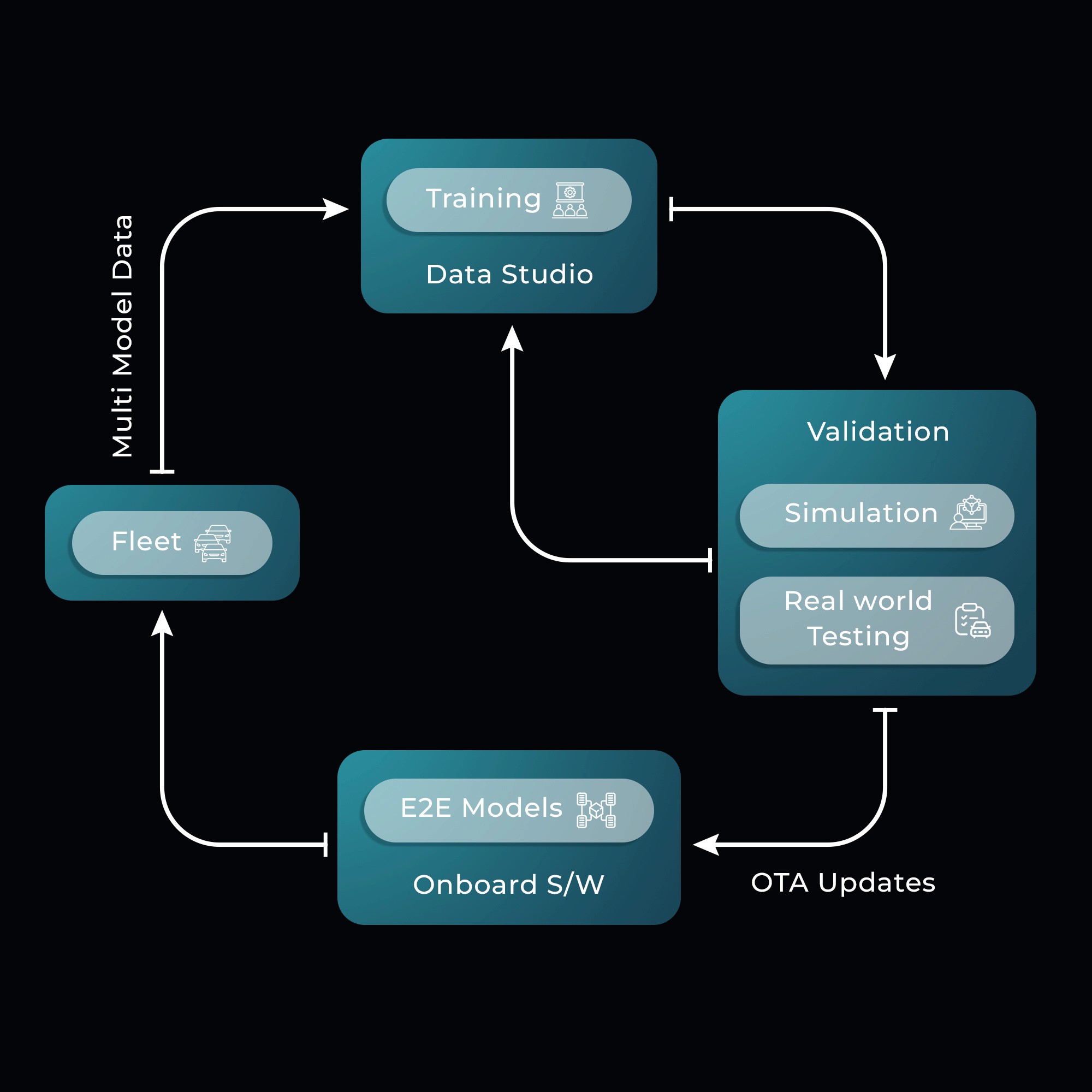
We are developing a comprehensive suite that includes foundational driving models, training frameworks, on-board software, safety mechanisms, APIs, data platform and testing framework. Having a bespoke stack enables us to take advantage of advanced engineering technologies to develop, test and productionize foundational models for ADAS in the most safe and scalable manner.
Having a bespoke stack enables us to take advantage of advanced engineering technologies to develop, test and productionize foundational models for ADAS in the most safe and scalable manner.
Indigenously built to accelerate the path from development to production.
We are developing a comprehensive suite that includes foundational driving models, training frameworks, on-board software, safety mechanisms, APIs, data platform and testing framework. Having a bespoke stack enables us to take advantage of advanced engineering technologies to develop, test and productionize foundational models for ADAS in the most safe and scalable manner.
Having a bespoke stack enables us to take advantage of advanced engineering technologies to develop, test and productionize foundational models for ADAS in the most safe and scalable manner.
Full Stack AI Platform for ADAS
Indigenously built to accelerate the path from development to production.
We are developing a comprehensive suite that includes foundational driving models, training frameworks, on-board software, safety mechanisms, APIs, data platform and testing framework. Having a bespoke stack enables us to take advantage of advanced engineering technologies to develop, test and productionize foundational models for ADAS in the most safe and scalable manner.
Having a bespoke stack enables us to take advantage of advanced engineering technologies to develop, test and productionize foundational models for ADAS in the most safe and scalable manner.
Simulation
The true test of autonomous driving is its generalizability to the long tail scenarios - the one in a million cases that are hard to find in real world data. To ensure safety of ADAS in emerging markets where such cases are much frequent, having the capability to create such scenarios in simulation and validating the algorithms becomes all the more important.
At Minus Zero, we have been building a photo-realistic driving simulator bespoke for generating thousands of such scenarios unique to emerging markets for training, testing, and debugging our end-to-end models.
Data Studio
To harness data-driven scalability for ADAS algorithms, it requires data infrastructure tailored to handle large scale fleet data. Data Studio is a vital off-board toolkit allowing our engineering teams to streamline data ingestion & training workflows and to accelerate analysis with flexible data retrieval, visualisation & observability tools. It features foundational LLMs to query large-scale multi-modal data, find unique driving patterns, and remove anomalies, thereby allowing continuous model improvements.
This is built to further help customers customise the software to unique vehicle layouts and ODDs requirement for different geographies.
On-board Software
To enable interaction of our end-to-end driving models with in-vehicle hardware and systems, we deliver them with a seamlessly coupled on-board software that includes runtime framework, middleware, diagnostics & safety mechanisms, APIs, OTA updates, and development utilities.
Designed to be fully compatible with next-generation OEM hardware, this allows seamless integration with base vehicle, in-vehicle compute, HMI, and sensing systems, and allows for further customization.
Simulation
The true test of autonomous driving is its generalizability to the long tail scenarios - the one in a million cases that are hard to find in real world data. To ensure safety of ADAS in emerging markets where such cases are much frequent, having the capability to create such scenarios in simulation and validating the algorithms becomes all the more important.At Minus Zero, we have been building a photo-realistic driving simulator bespoke for generating thousands of such scenarios unique to emerging markets for training, testing, and debugging our end-to-end models.
Data Studio
To harness data-driven scalability for ADAS algorithms, it requires data infrastructure tailored to handle large scale fleet data. Data Studio is a vital off-board toolkit allowing our engineering teams to streamline data ingestion & training workflows and to accelerate analysis with flexible data retrieval, visualisation & observability tools. It features foundational LLMs to query large-scale multi-modal data, find unique driving patterns, and remove anomalies, thereby allowing continuous model improvements.This is built to further help customers customise the software to unique vehicle layouts and ODDs requirement for different geographies.
On-board Software
To enable interaction of our end-to-end driving models with in-vehicle hardware and systems, we deliver them with a seamlessly coupled on-board software that includes runtime framework, middleware, diagnostics & safety mechanisms, APIs, OTA updates, and development utilities. Designed to be fully compatible with next-generation OEM hardware, this allows seamless integration with base vehicle, in-vehicle compute, HMI, and sensing systems, and allows for further customization.
Simulation
The true test of autonomous driving is its generalizability to the long tail scenarios - the one in a million cases that are hard to find in real world data. To ensure safety of ADAS in emerging markets where such cases are much frequent, having the capability to create such scenarios in simulation and validating the algorithms becomes all the more important.At Minus Zero, we have been building a photo-realistic driving simulator bespoke for generating thousands of such scenarios unique to emerging markets for training, testing, and debugging our end-to-end models.
Data Studio
To harness data-driven scalability for ADAS algorithms, it requires data infrastructure tailored to handle large scale fleet data. Data Studio is a vital off-board toolkit allowing our engineering teams to streamline data ingestion & training workflows and to accelerate analysis with flexible data retrieval, visualisation & observability tools. It features foundational LLMs to query large-scale multi-modal data, find unique driving patterns, and remove anomalies, thereby allowing continuous model improvements.
This is built to further help customers customise the software to unique vehicle layouts and ODDs requirement for different geographies.
On-board Software
To enable interaction of our end-to-end driving models with in-vehicle hardware and systems, we deliver them with a seamlessly coupled on-board software that includes runtime framework, middleware, diagnostics & safety mechanisms, APIs, OTA updates, and development utilities. Designed to be fully compatible with next-generation OEM hardware, this allows seamless integration with base vehicle, in-vehicle compute, HMI, and sensing systems, and allows for further customization.

